Control Systems
Stability
Practice questions from Stability.
30
Total0
Attempted0
Correct0
IncorrectConsider the polynomial
. Let be defined as follows.

is the number of roots of with negative real parts.
is the number of roots of that are purely imaginary.
is the number of roots of with positive real parts.
Which one of the following options is correct?
, and
, and
, and
, and
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
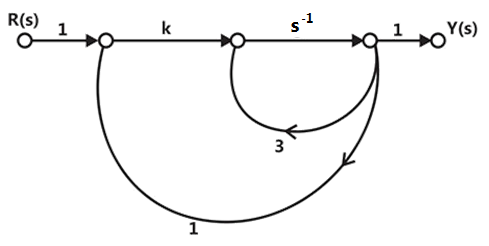
Sign in to UnlockIn the feedback control system shown in the figure below .
R(s), Y(s) and E(s) are the Laplace transforms of r(t), y(t), and e(t), respectively. If the input r(t) is a unit step function, then ________.
does not exist, e(t) is oscillatory
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
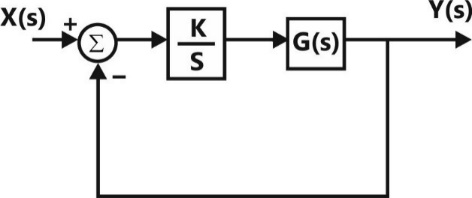
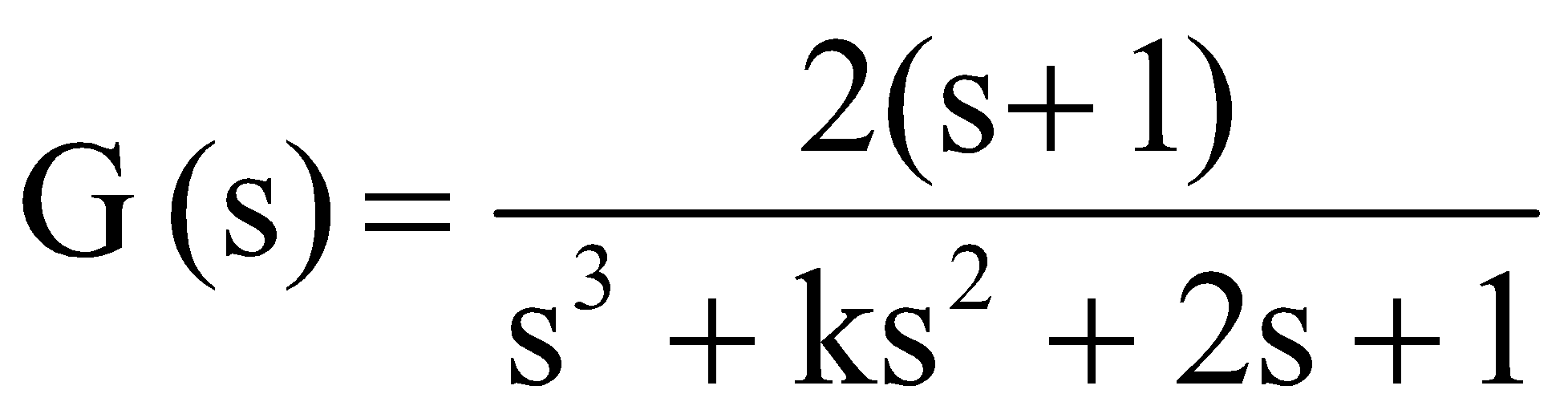
Sign in to UnlockConsider a unity negative feedback control system with forward path gain as shown.
The impulse response of the closed-loop system decays faster than if


Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockConsider an even polynomial given by

where is an unknown real parameter. The complete range of for which has all its roots on the imaginary axis is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe loop transfer function of a negative feedback system is
The value of , for which the system is marginally stable, is________.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
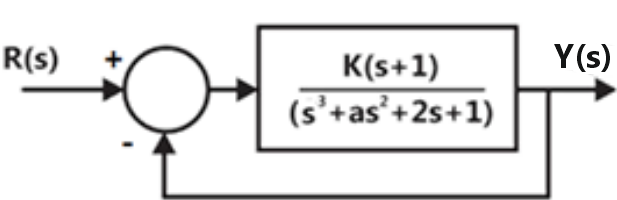
Sign in to UnlockConsider a unity feedback system, as in the figure shown, with an integral compensator and open-loop transfer function
Where. The positive value of K for which there are exactly two poles of the unity feedback system on the axis is equal to __________ (rounded off to two decimal places).
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
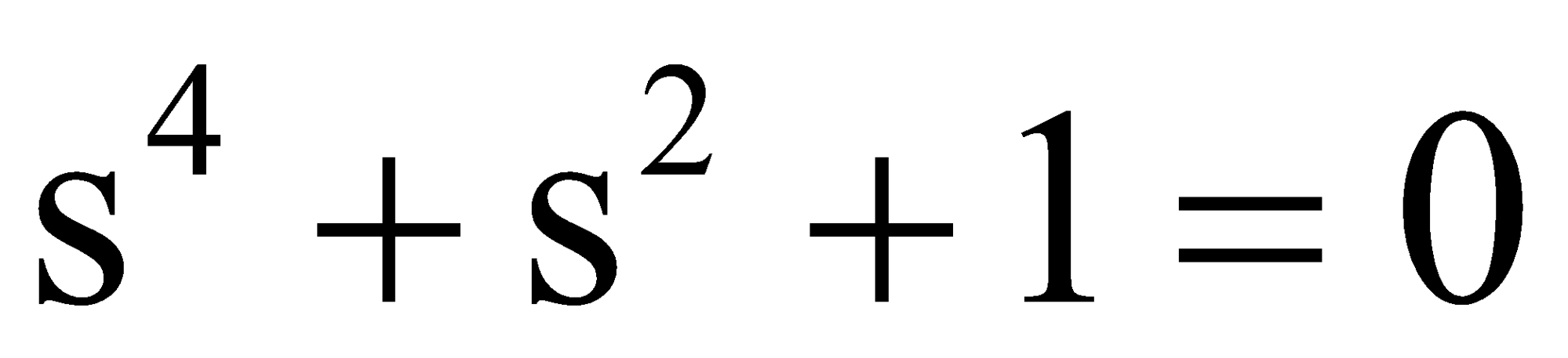
Sign in to UnlockWhich one of the following options correctly describes the locations of the roots of the equation on the complex plane?
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA unity feedback control system is characterized by the open-loop transfer function
. The value of k for which the system oscillates at 2 rad/s is ___________
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockMatch the inferences X, Y, and Z, about a system, to the corresponding properties of the elements of first column in Routh's Table of the system characteristic equation
X: The system is stable ...
Y: The system is unstable ...
Z: The test breaks down ...
P: ... when all elements are positive
Q: ... when any one element is zero
R: ... when there is a change in sign of coefficient
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe transfer function of a linear time invariant system is given by

The number of zeros in the right half of the s-plane is_______________
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe first two rows in the Routh table for the characteristics equation of a certain closed-loop control system are given as

The range of K for which the system is stable is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA plant transfer function is given as
. When the plant operates in a unity feedback configuration, the condition for the stability of the closed loop system is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe characteristic equation of an LTI system is given by. The number of roots that lie strictly in the left half s-plane is ______.

Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe feedback system shown below oscillates at 2rad/s when
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
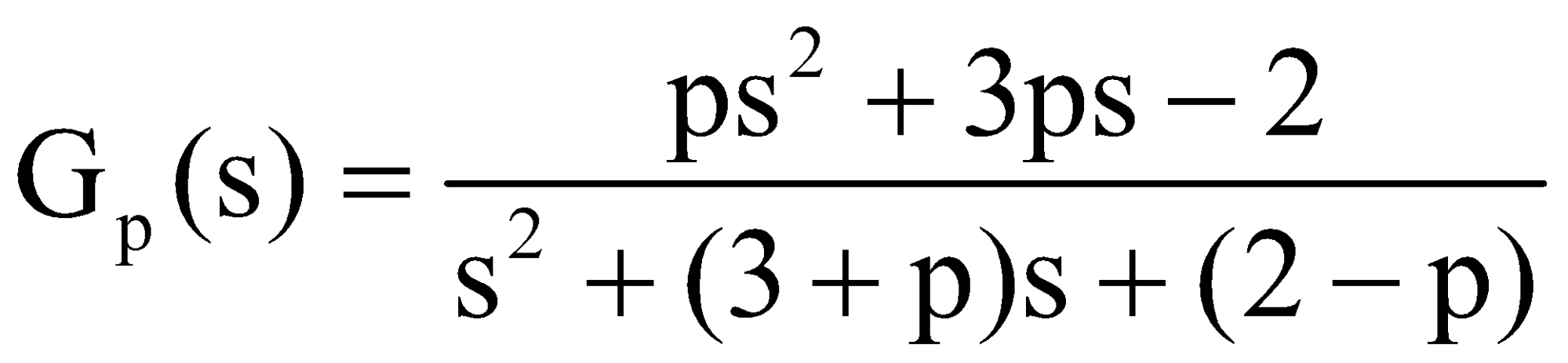
Sign in to UnlockConsider a transfer function with p a positive real parameter. The maximum value of p until which remains stable is _____.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA certain system has transfer function, where is a parameter. Consider the standard negative unity feedback configuration as shown below.
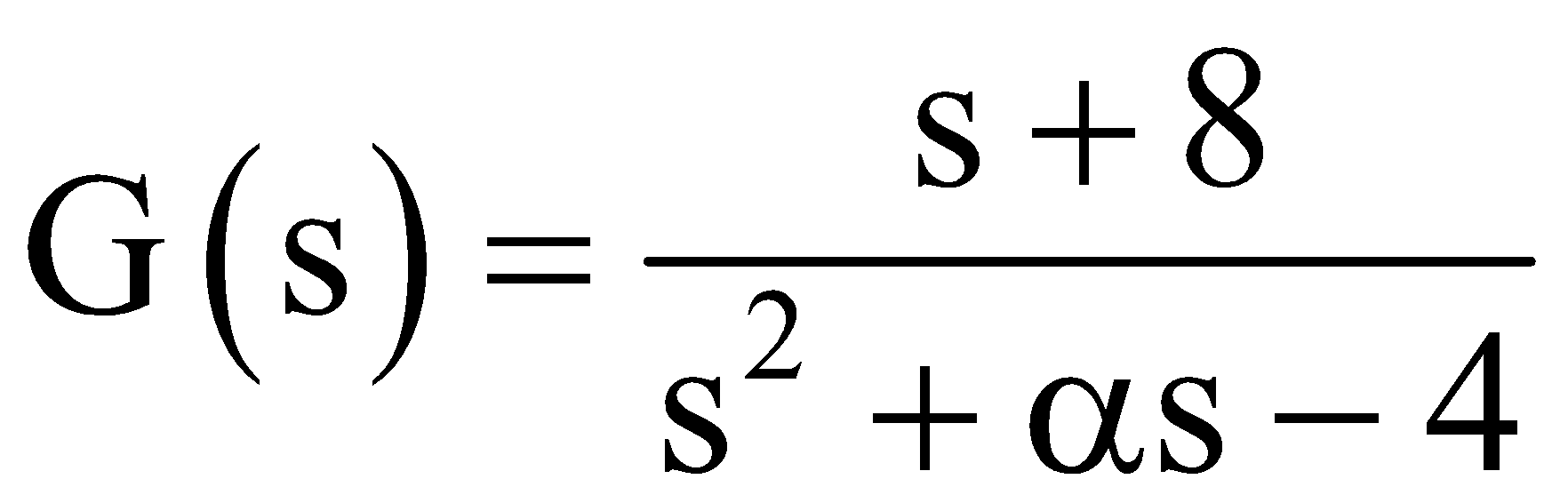
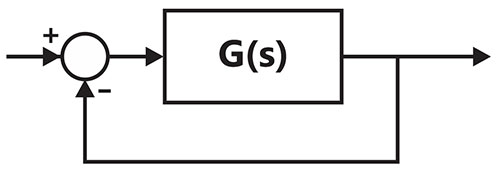
Which of the following statements is true?
The closed-loop system is never stable for any value of.
For some positive values of , the closed loop system is stable, but not for all positive values.
For all positive values of , the closed loop system is stable.
The closed loop system is stable for all values of , both positive and negative.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe number of open right half plane poles of is

Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe positive values of “K” and “a” so that the system shown in the figure below oscillates at a frequency of 2rad/sec respectively are
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe open loop transfer function of a unity feedback system is .
The range of K for which the system is stable is
13 > K > 0
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockFor the polynomial
, the number of roots which lie in the right half of the s-plane is

Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe system shown in Figure remains stable when
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe characteristic polynomial of a system is . The system is

Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe feedback control system in Figure is stable
For all
Only if
Only if
Only if
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
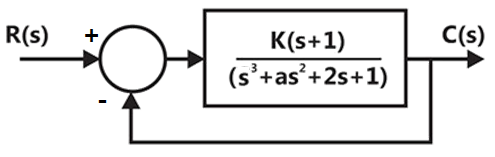
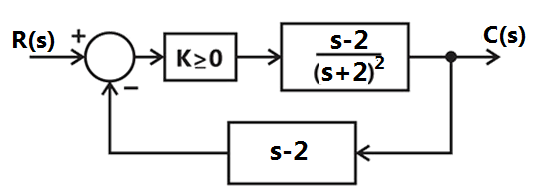
Sign in to UnlockConsider the feedback control system in Figure.
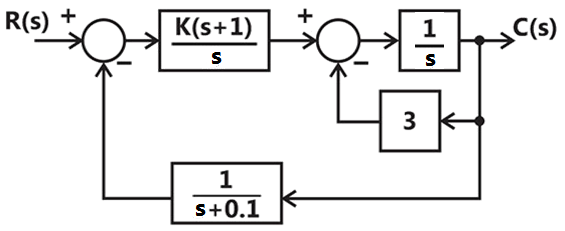
Transfer function of the system
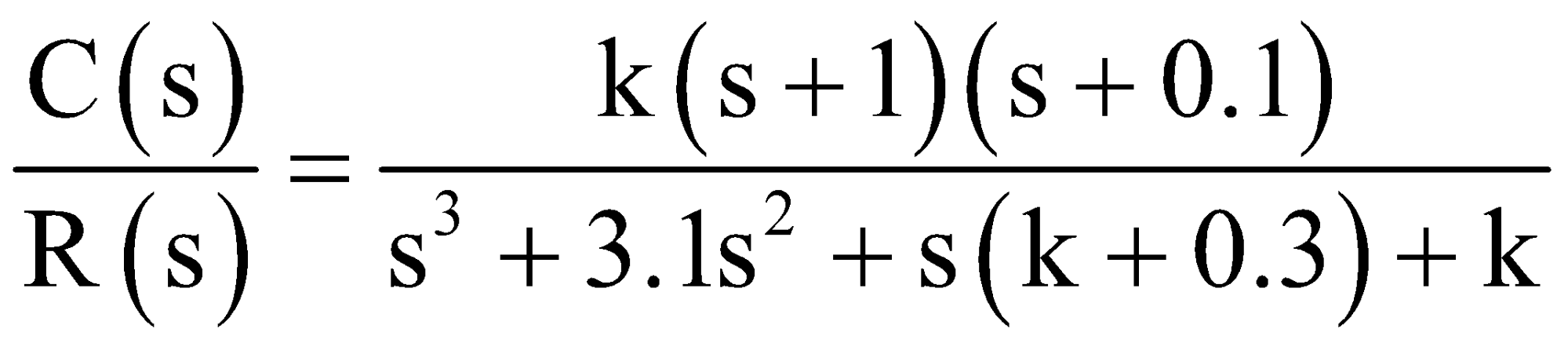
Characteristic equation of the system

The system is stable for K>0
The system is stable for K<0
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA system described by the transfer function is stable. The constraints on and k are.
,
,
,
,
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe loop transfer function of a feedback control system is given by
,
Using Routh-Hurwitz criterion, determine the region of K-T plane in which the closed-loop system is stable.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe number of roots of in the left half of the s-plane is

Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe characteristic equation of a feedback control system is

(i) Determine the range of K for the system to be stable.
(ii) Can the system be marginally stable? If so, find the required value of K and the frequency of sustained oscillation.
(i)
(ii) &
(i) K<1.49
(ii) K=-1.49 &
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
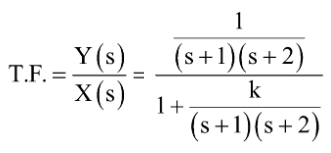
Sign in to UnlockThe figure shows the block diagram representation of control system. The system in block A has an impulse response. The system in block B has an impulse response. The block ‘K’ amplifies its inputs by a factor k. For the overall system with input and output
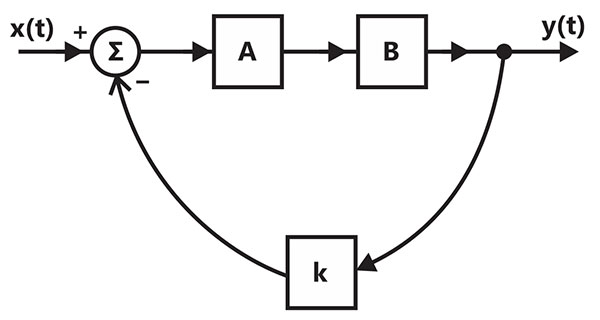
Transfer function, When k=1
Impulse response when K=0
values of k for which the system becomes unstable
k<-2
values of k for which the system becomes unstable
k>-2
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockIf , then all the roots of this equation are in the left half plane provided that

Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to Unlock