Control Systems
Time Response Analysis
Practice questions from Time Response Analysis.
48
Total0
Attempted0
Correct0
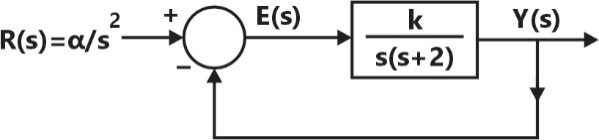
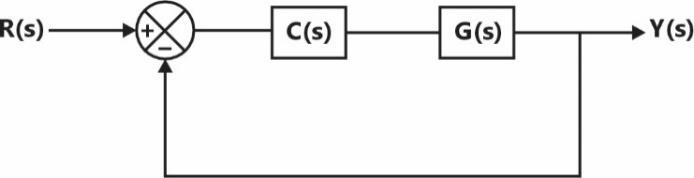
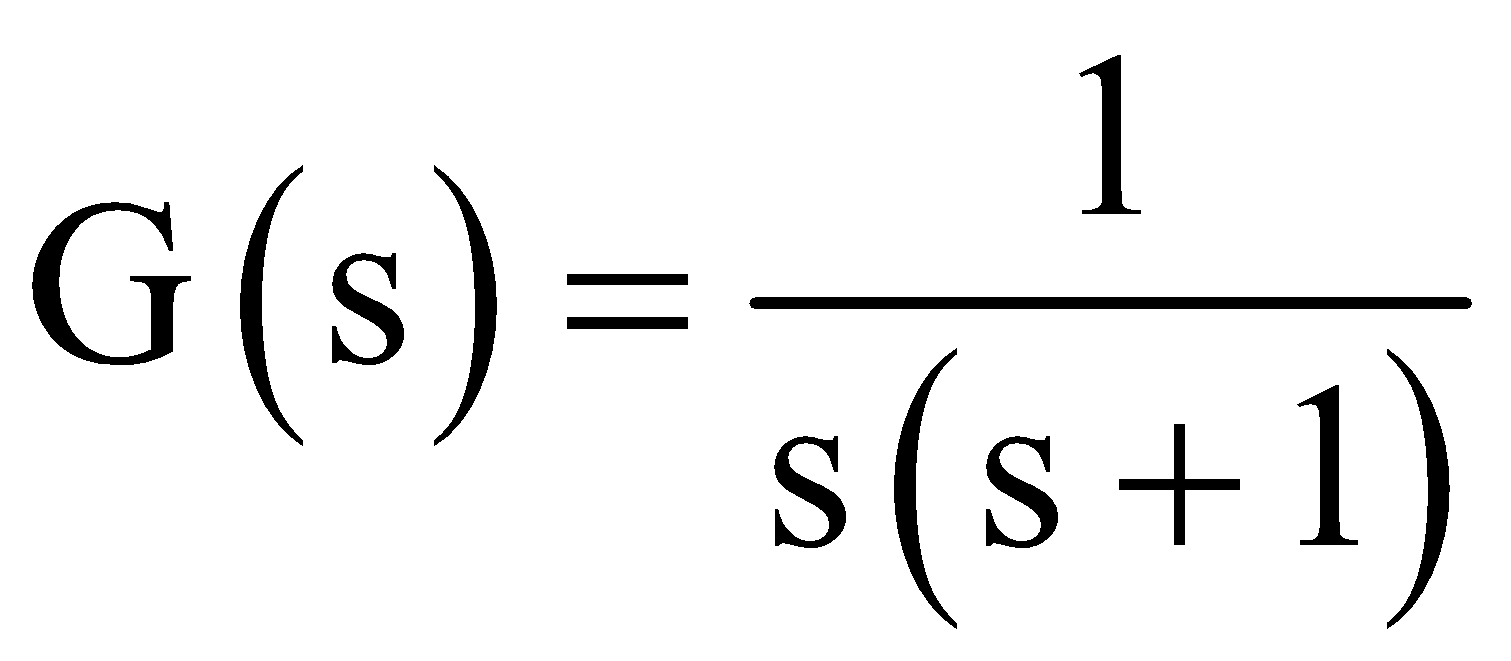
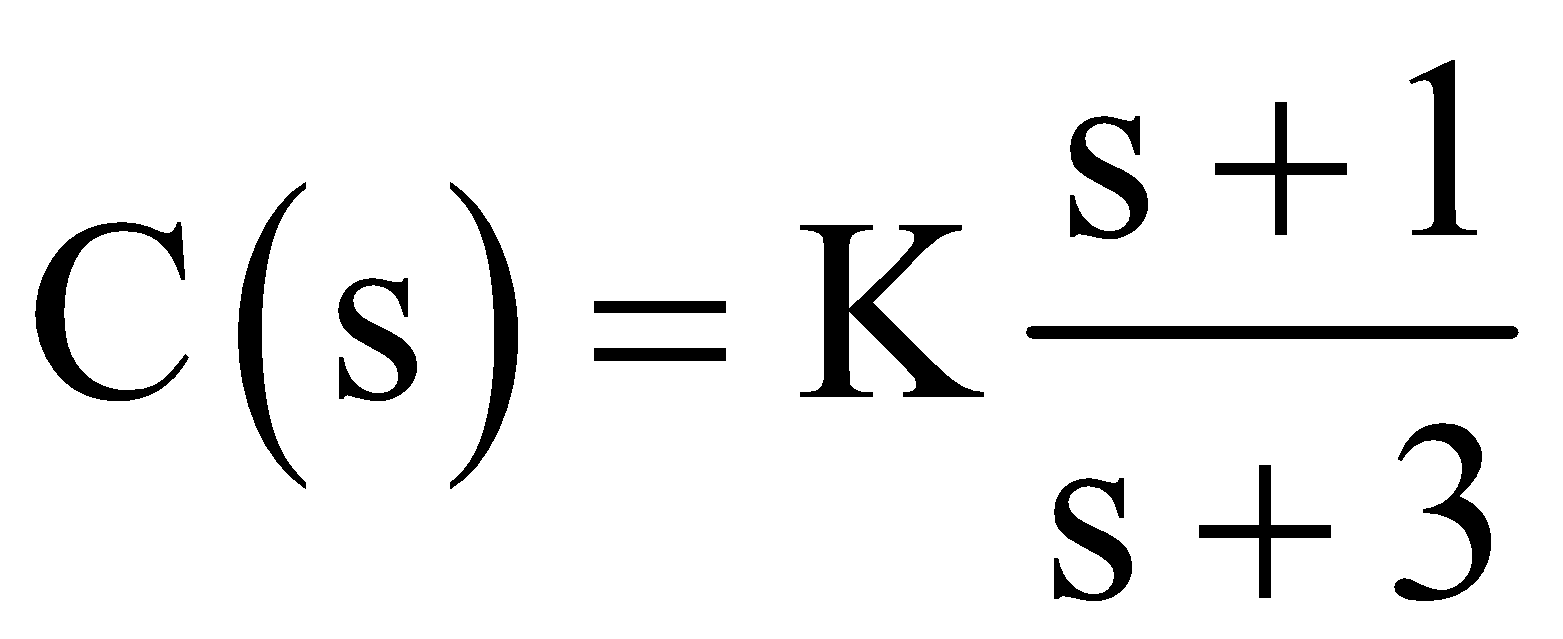
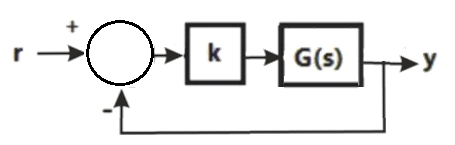
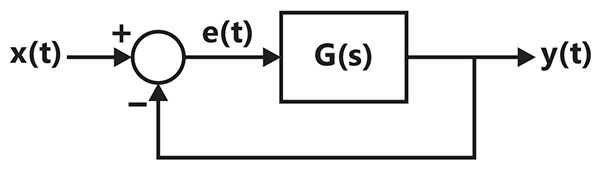
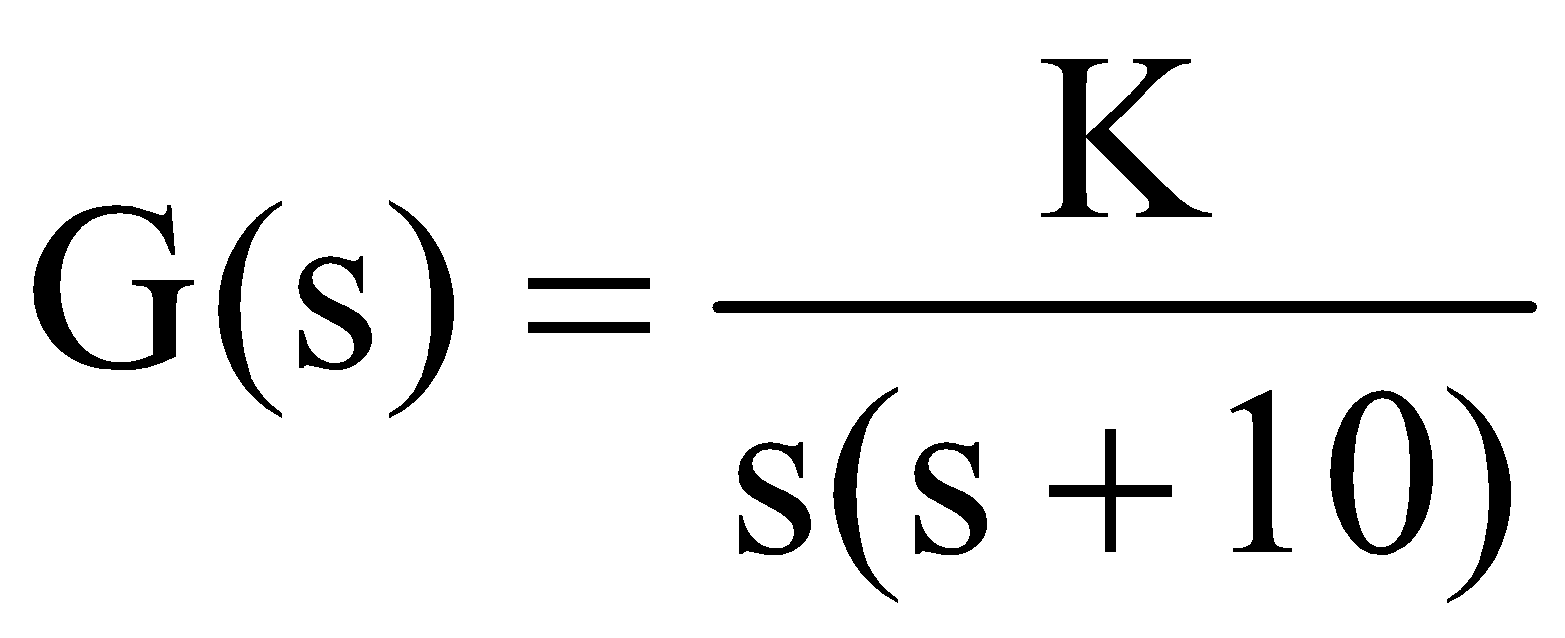
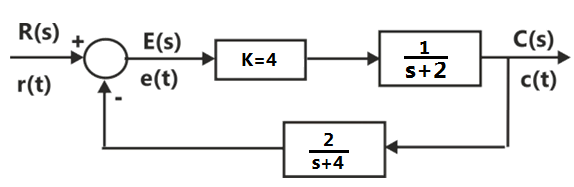
IncorrectA closed loop system is shown in the figure where and . The steady state error due to a ramp input is given by
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockTwo linear time-invariant systems with transfer functions

have unit step responses and , respectively. Which of the following statements is/are true?
and have the same percentage peak overshoot.
and have the same steady-state value.
and have the same damped frequency of oscillation.
and have the same settling time.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
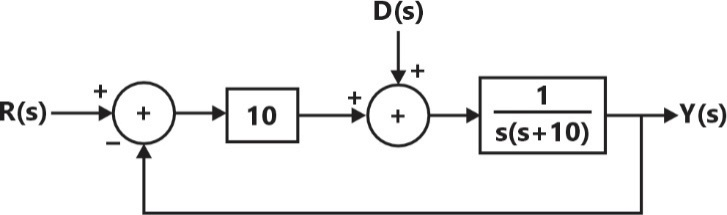
Sign in to UnlockThe block diagram of a closed-loop control system is shown in the figure. , and are the Laplace transforms of the time-domain signals , and , respectively. Let the error signal be defined as . Assuming the reference input for all , the steady state error , due to a unit step disturbance , is __________(rounded off to two decimal places).
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
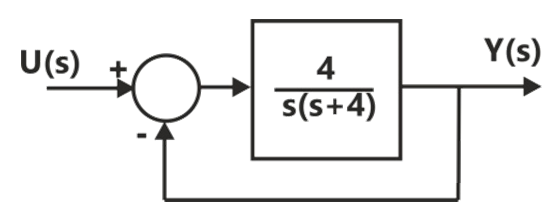
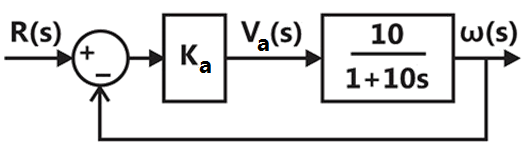
Sign in to UnlockConsider the following closed loop control system
where and . If the steady state error for a unit ramp input is 0.1 , then the value of is __________.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
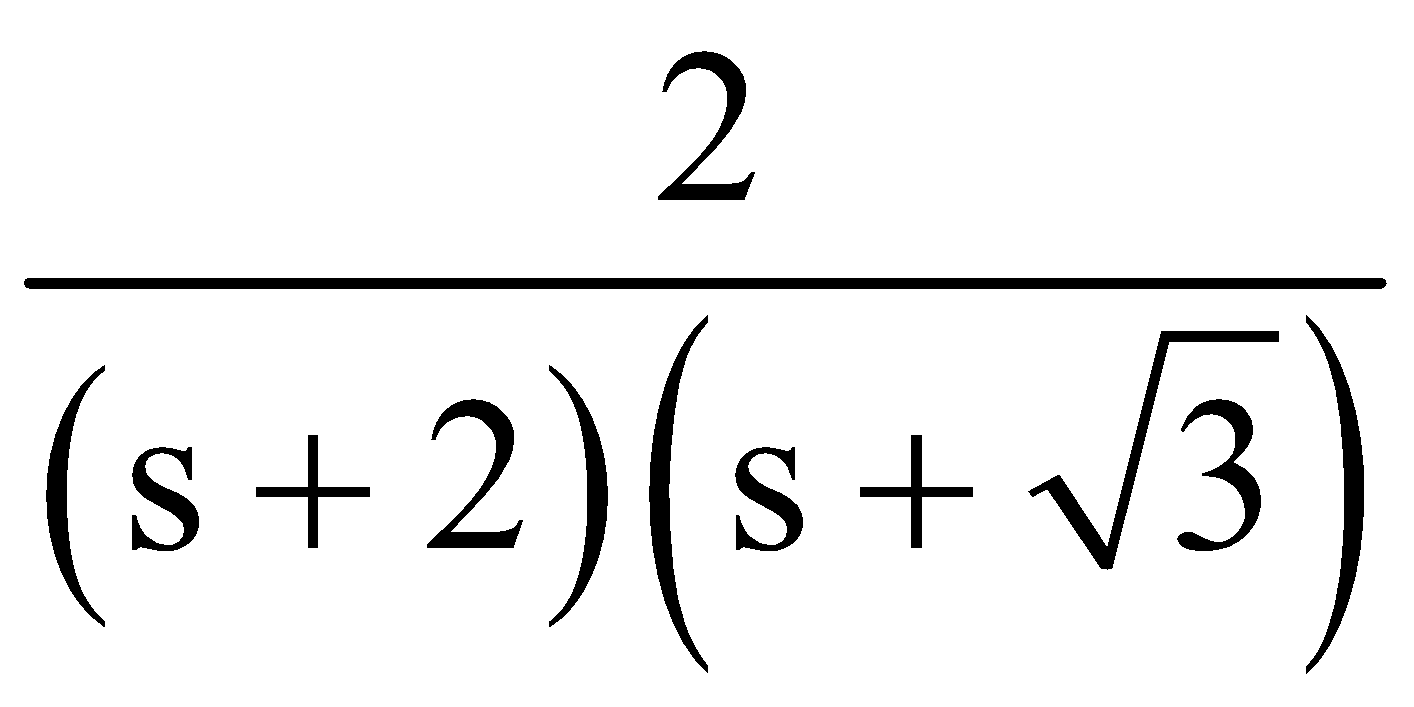
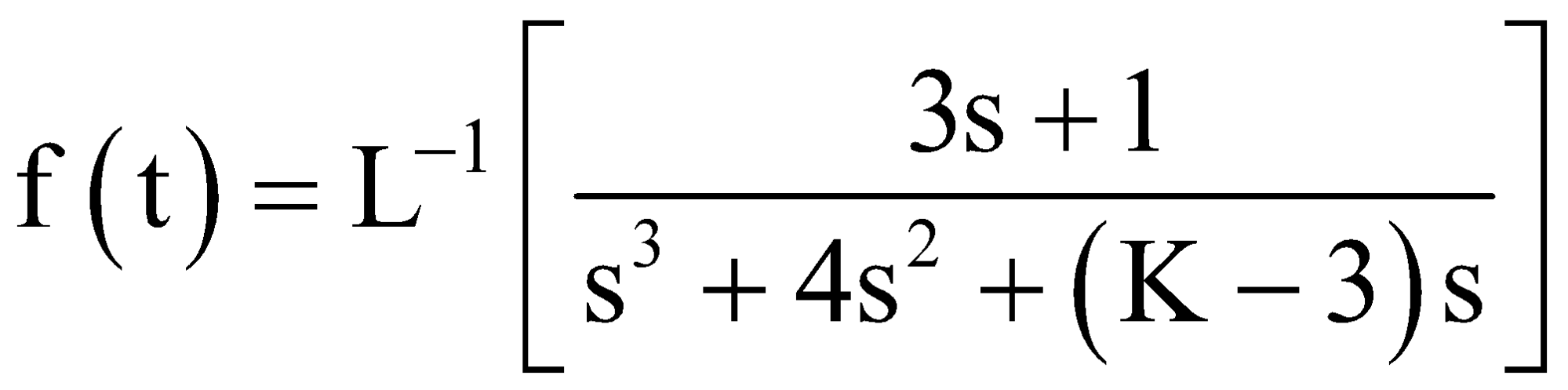
Sign in to UnlockLet Y(s) be the unit step response of a casual system having a transfer function
That is ,. The forced response of the system is


Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockConsider a casual second-order system with the transfer function
With a unit stepas an input. Let C(s) be the corresponding output. The time taken by the system output c(t) to reach 94% of its steady state value, rounded off to two decimal places, is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockFor a unity feedback control system with the forward path transfer function
The peak resonant magnitudeof the closed-loop frequency response is 2. The corresponding value of the gain K (correct to two decimal places) is _______
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe open loop transfer function
Where p is an integer, is connected in unity feedback configuration as shown in the figure.
Given that the steady state error is zero for unit step input and is 6 for unit ramp input, the value of the parameter p is ________________.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA second-order LTI system is described by the following state equations.

Where and are the two state variables and r(t) denotes the input. The output. The system is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe transfer function of a causal LTI system H(s) = 1/s. If the input to the system is , where u (t) is a unit step function, the system output __________.

Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
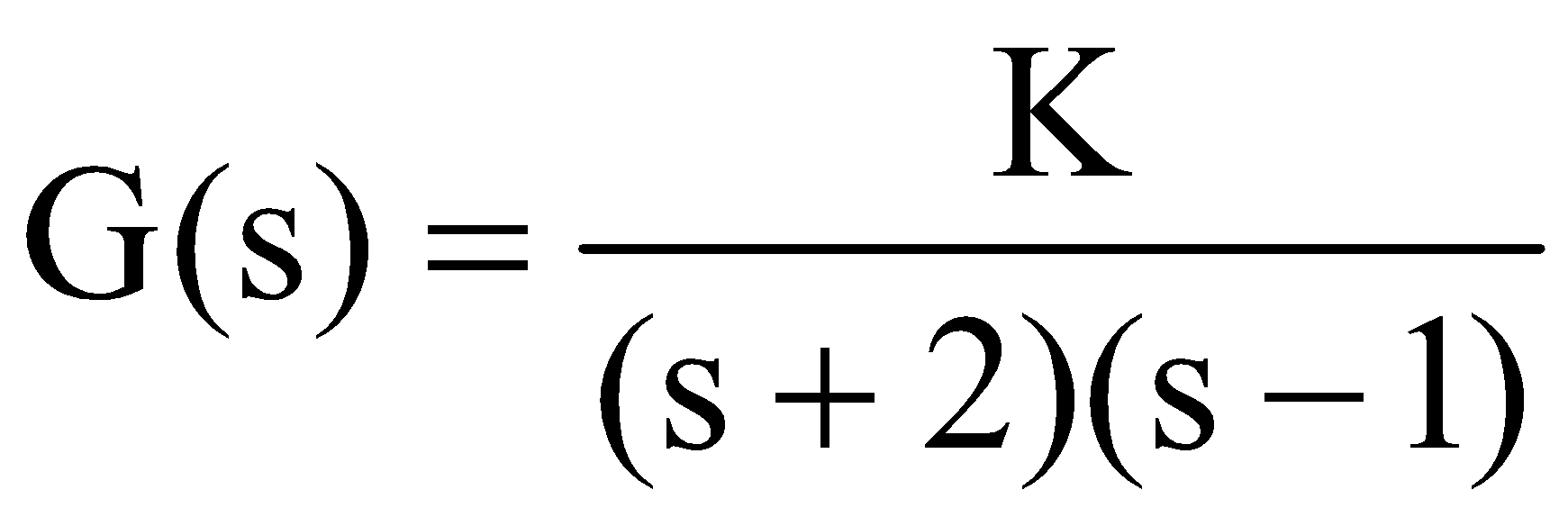
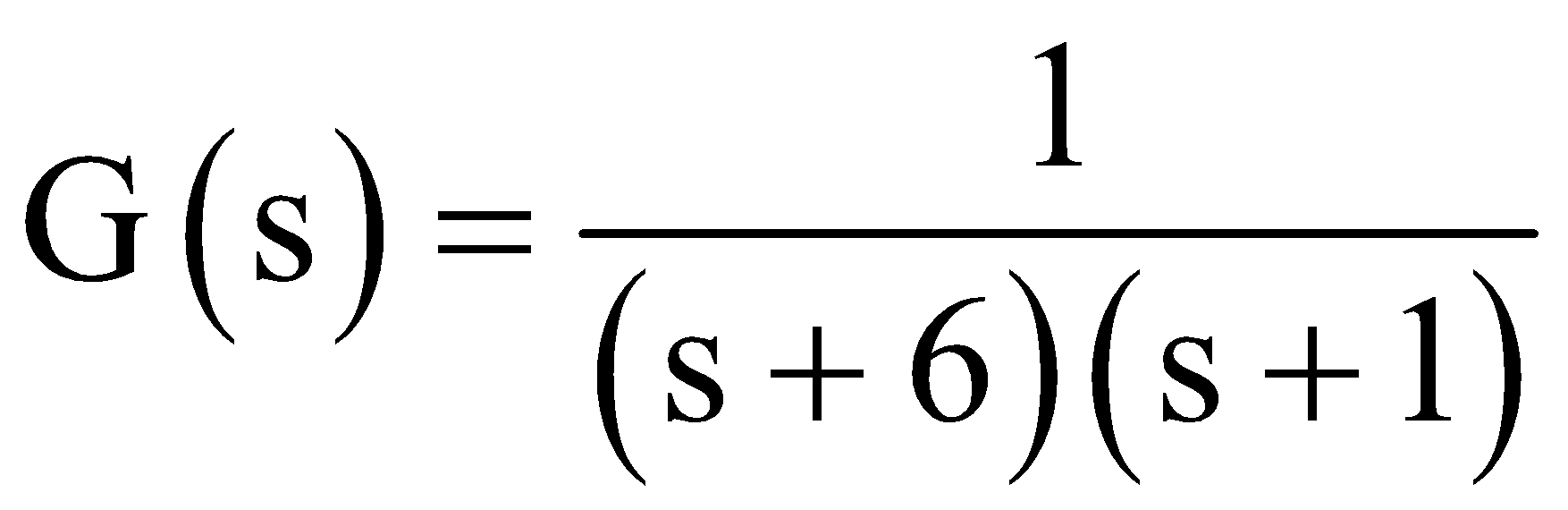
Sign in to UnlockThe open-loop transfer function of a unity-feedback control system is given by.
For the peak overshoot of the closed-loop system to a unit step input to be 10%, the value of K is_____.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
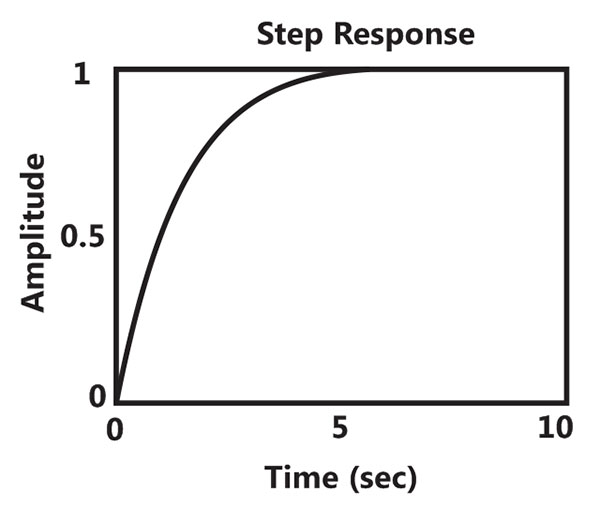
Sign in to UnlockIn the feedback system shown below. The step response of the closed loop system should have minimum settling time and have no overshoot.
The required value of gain k to achieve this is ________.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
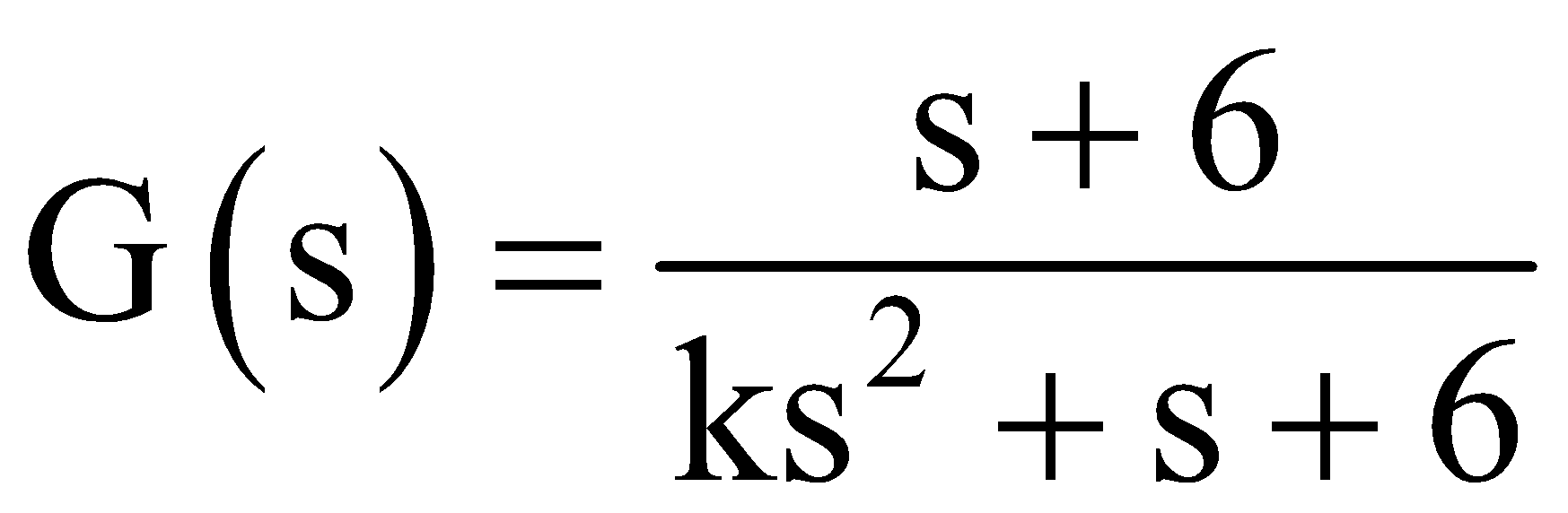
Sign in to UnlockFor the unity feedback control system shown in the figure, the open-loop transfer function G(s) is given as . The steady state error due to a unit step input is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA unity negative feedback system has an open-loop transfer function. The gain K for the system to have a damping ratio of 0.25 is ________.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe output of a standard second-order system for a unit step input is given as
.
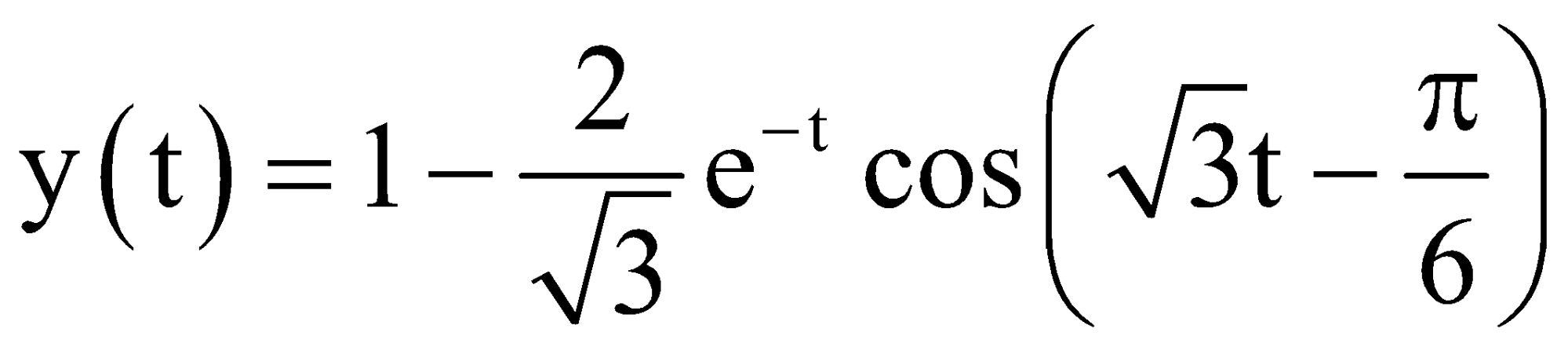
The transfer function of the system is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe transfer function of a mass-spring-damper system is given by . The frequency response data for the system are given in the following table.
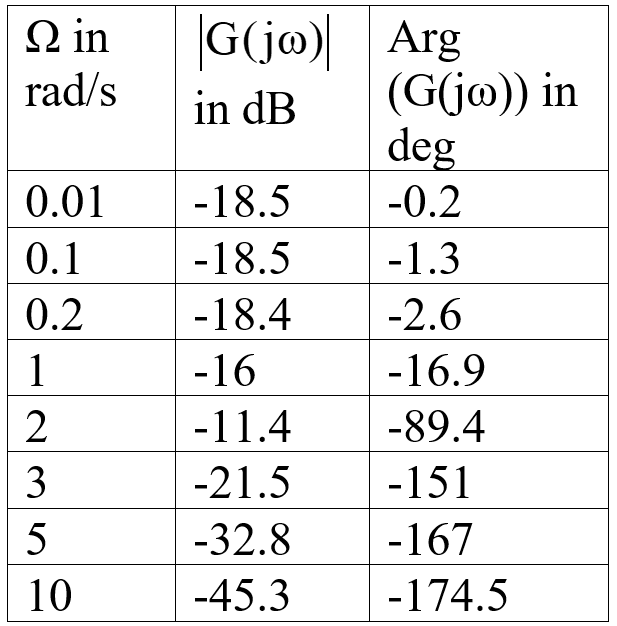
The unit step response of the system approaches a steady state value of
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
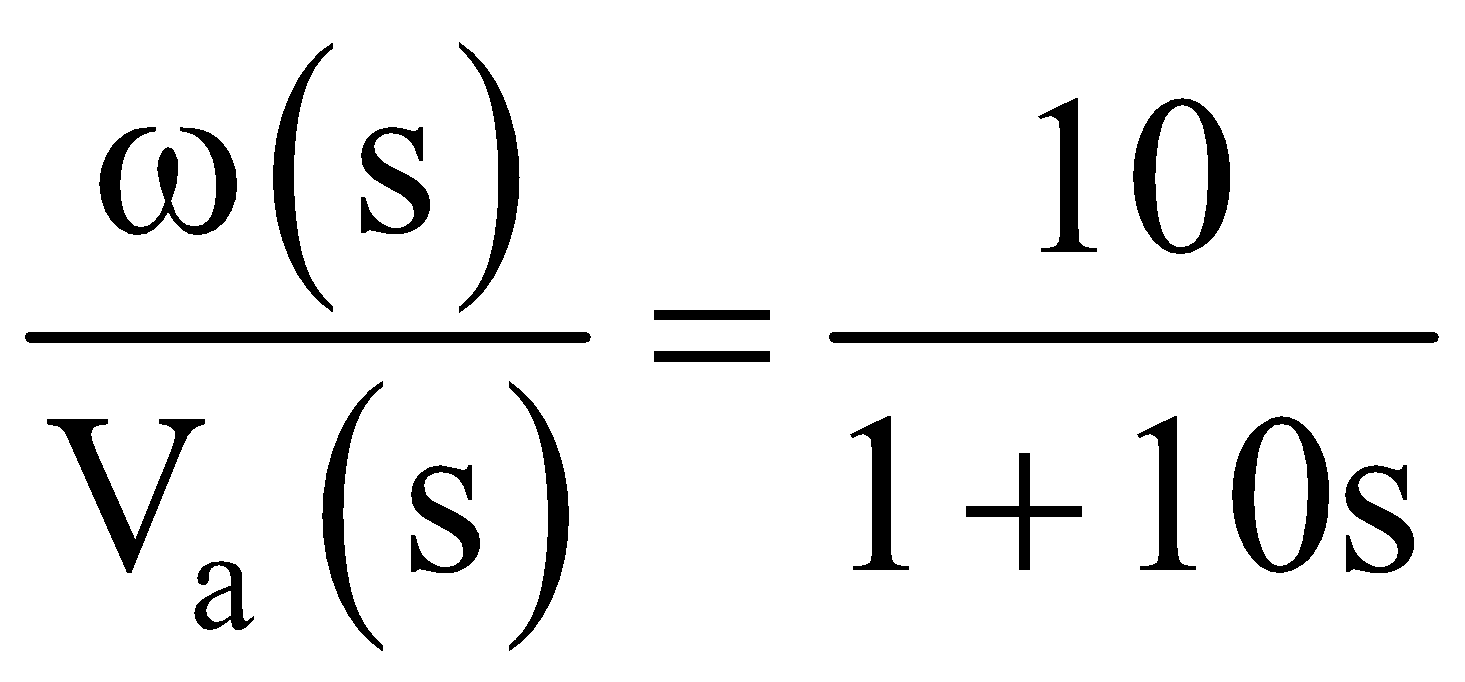
Sign in to UnlockThe position control of a DC servo-motor is given in the figure.
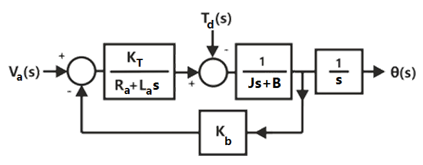
The values of the parameters are
N-m/(rad/sec) and . The steady-state position response (in radians) due to unit impulse disturbance torque is _______.


Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe forward path transfer function of a unity negative feedback system is given by. The value of K which will place both the poles of the closed-loop system at the same location is ______.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe natural frequency of an un-damped second-order system is 40rad/s. If the system is damped with a damping ratio 0.3, the damped natural frequency in rad/s is ____.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe steady state error of the system shown in the figure for a unit step input is _________.
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockFor the second-order closed-loop system shown in the figure, the natural frequency (in rad/s) is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe open-loop transfer function of a dc motor is given as . When connected in feedback as shown below, the approximate value of that will reduce the time constant of the closed loop system by one hundred times as compared to that of the open-loop system is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockGiven.
If , then the value of K is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe unit step response of an under-damped second order system has steady state value of -2. Which one of the following transfer functions has these properties?
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
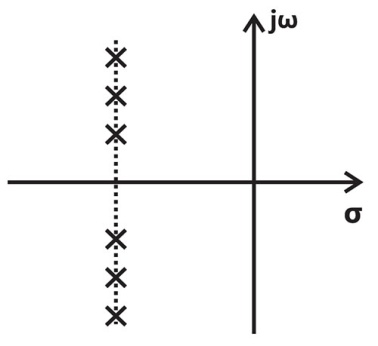
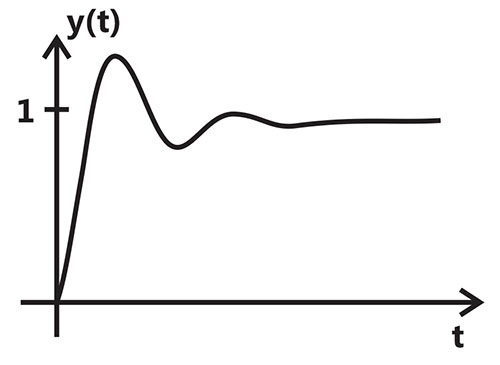
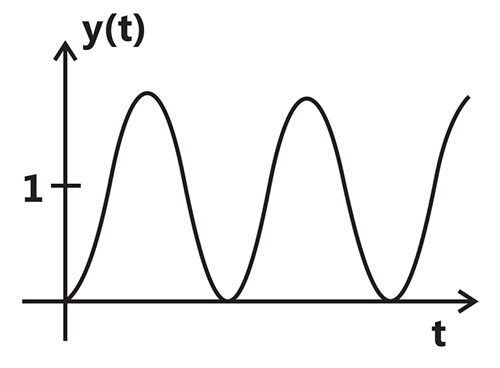
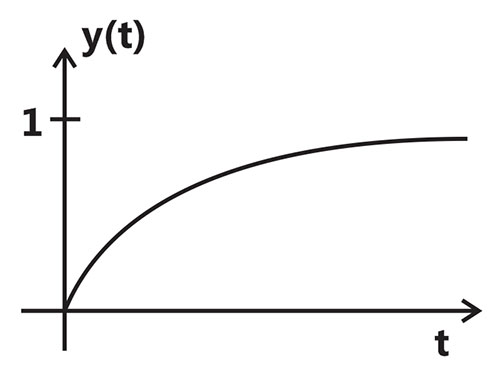
Sign in to UnlockStep responses of a set of three second-order under-damped systems all have the same percentage overshoot. Which of the following diagrams represents the poles of the three systems?
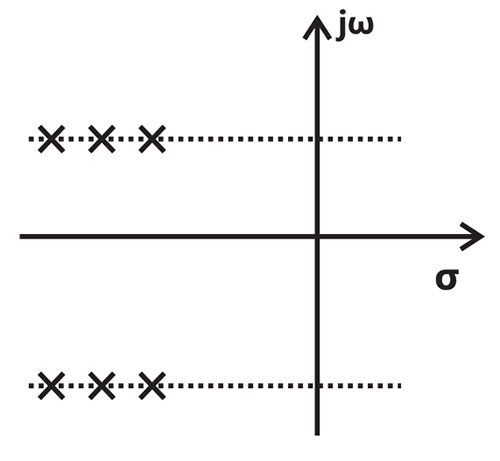
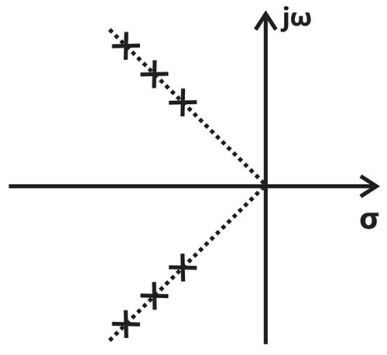
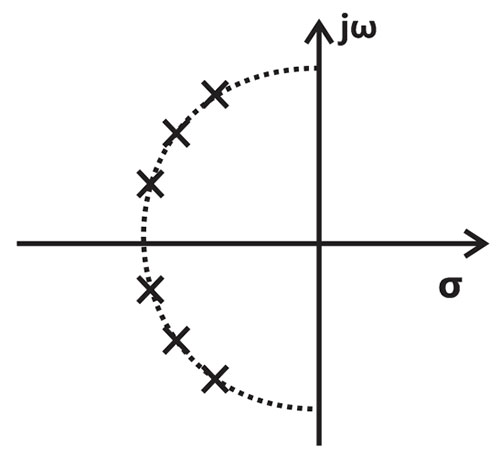
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockGroup I lists a set of four transfer functions. Group II gives a list of possible step responses y(t). Match the step responses with the corresponding transfer functions.
Group I
Group II
(1)
(2)
(3)
(4)




Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
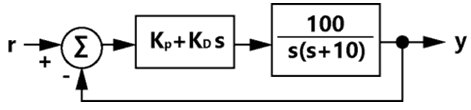
Sign in to UnlockA control system with a PD controller is shown in the figure. If the velocity error constant and the damping ratio ζ =0.5, then the values of and are




Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe unit impulse response of a system is: , . For this system, the steady-state value of the output for unit step input is equal to
-1
0
1
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockIn the derivation of the expression for peak percent overshoot, , which one of the following conditions is NOT required?
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA unit ramp input applied to an unity feedback system results in 5% steady state error. The type number and zero frequency gain of the system are respectively.
1 and 20
0 and 20
0 and
1 and
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA second-order system has the transfer function With r(t) as the unit-step function, the response c(t) of the system is represented by
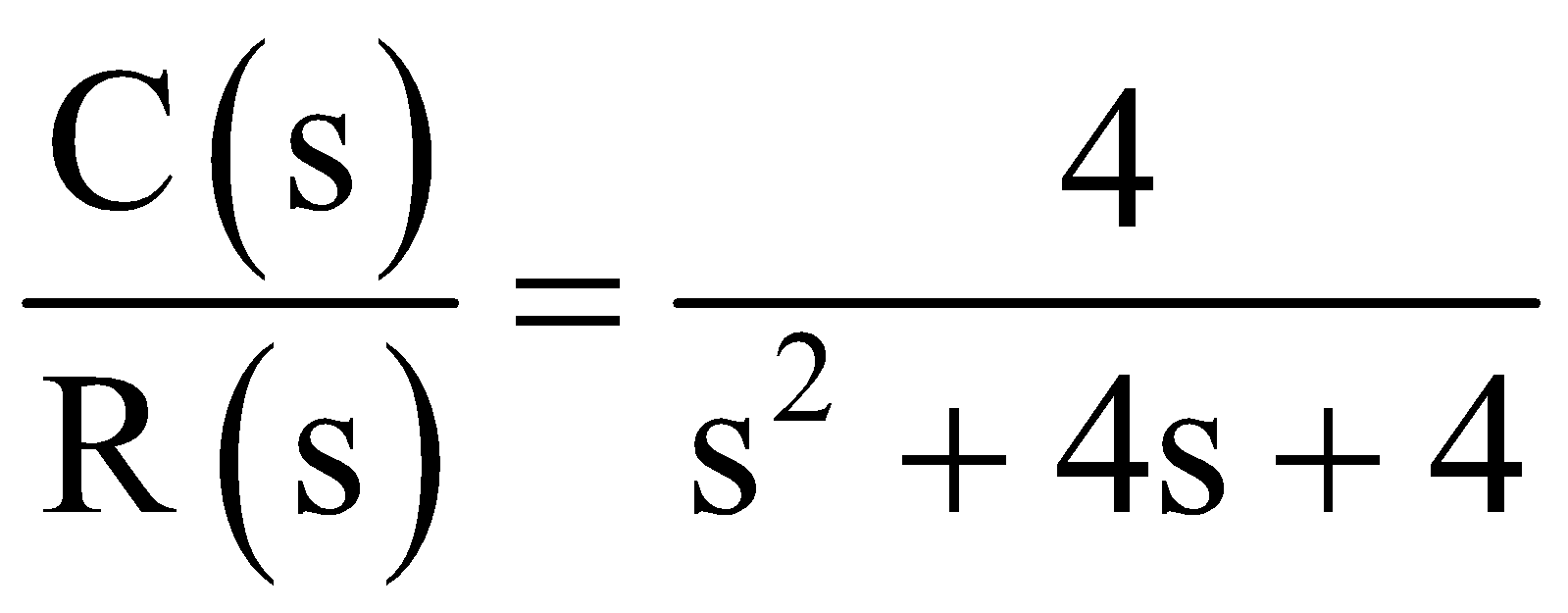
(a)
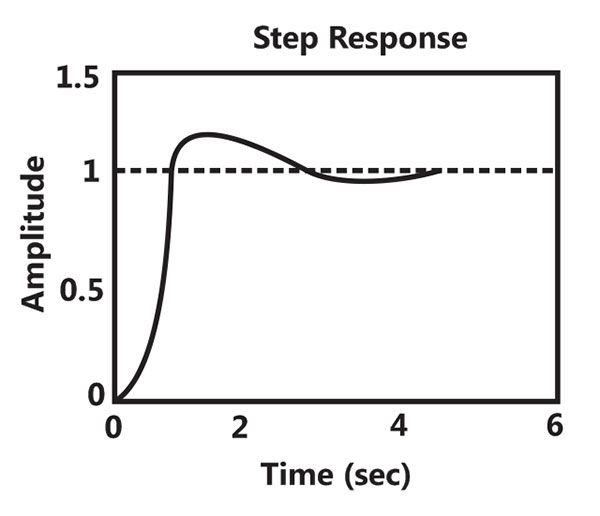
(b)
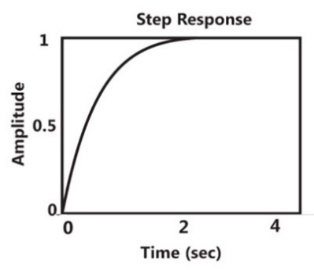
(c)
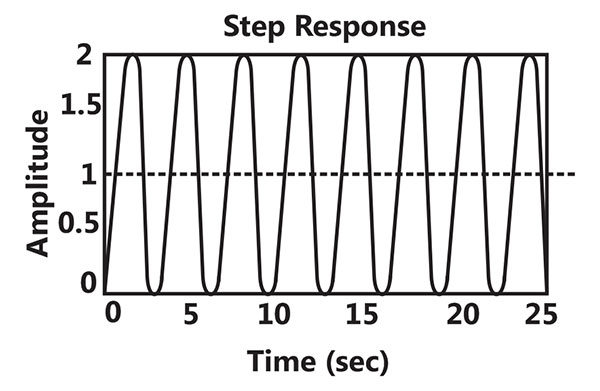
(d)
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockConsider a system with the transfer function.
Its damping ratio will be 0.5 when the value of k is
3
6
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe transfer function of a system is . For a unit step input to the system the approximate settling time for 2% criterion is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockIf the characteristic equation of a closed-loop system is , then the system is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe block diagram of a feedback system is shown in Fig (a).
(a) Find the closed-loop transfer function.
(b) Find the minimum value of G for which the step response of the system would exhibit an overshoot, as shown in Fig (b).
(c) For G equal to twice this minimum value, find the time period T indicated in Fig(b).
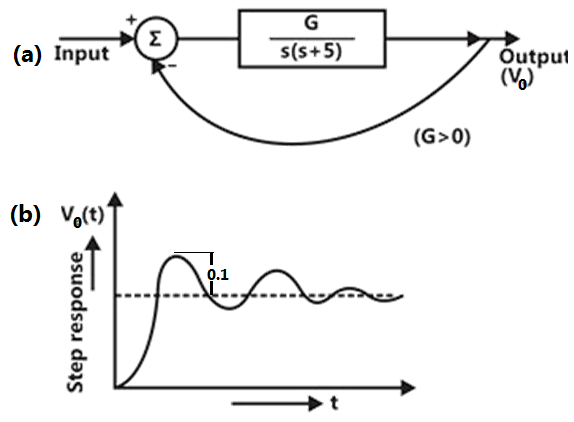
(a)
(b) minimum value of G = 6.25
(c) T = 2.51 Sec
(c) T = 3.51 Sec
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockFor a second-order system with the closed-loop transfer function.
The settling time for a 2-per cent band, in seconds, is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockIf the closed-loop transfer function T(s) of a unity negative feedback system is given by
.

Then the steady-state error for a unit ramp input is
zero
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockConsider a unity feedback control system with an open-loop transfer function. The steady state error of the system due to a unit step input is
zero
K
Infinite
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockConsider a feedback control system with an open-loop transfer function .
The type of the closed-loop system is
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe open-loop transfer function of a unity feedback open-loop system is.
The characteristic equation of the closed system is


Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockConsider the system shown in the figure. Determine the value of ‘a’ such that the damping ratio is 0.5. Also obtain the values of the rise time and maximum overshoot in its step response.
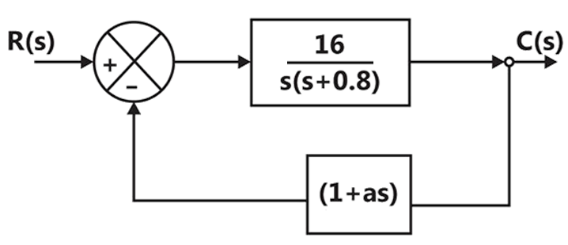
a=0.2
a=0.3
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe step input error coefficient of a system with unity feedback is
0
1
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockThe final value theorem is used to find the
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockFor a second-order system, the damping ratio, is , then the roots of the characteristic polynomial are
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockMatch the following
(A) Very low response at very high frequencies
(B) Overshoot
(C) Synchro-control transformer output
(1) Low-pass systems
(2) Velocity damping
(3) Natural frequency
(4) Phase-sensitive modulation
(5) Damping ratio
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA block diagram model of a position control system is shown in the figure.
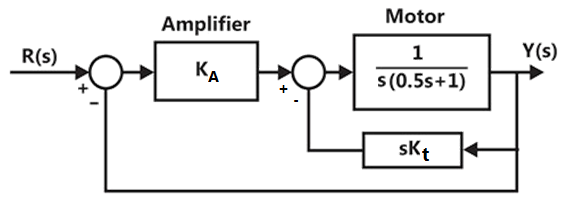
- In the absence of derivative feedback, determine damping ratio of the system for amplifier gain .
Also, find the steady state error to a unit ramp input.
- Find suitable values of the parameters and so that the damping ratio of the system is increased to 0.7 without affecting the steady-state error as obtained in part (a).
(a)
(a)
(b)
(b)
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA second order system has a transfer function given by . If the system, initially at rest is subjected to a unit step input at , the second peak in response will occur at
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to UnlockA unity feedback control system has the open loop transfer function. If the input to the system is a unit ramp, the steady state error will be
Sign in to see the solution
Log in to view the explanation, track your attempts, and keep your progress.
Sign in to Unlock